Phyrs - 0x03
archive time: 2025-07-12
模块与函数的组织是一门技术
前面两节大体介绍了动力学的相关概念,并且通过例子说明分析流程
这一节将介绍如何让之前的代码通用
随时间、位置和速度变化的力
之前提到了可以通过欧拉法来分析系统状态变化, 对于一个基本的三维物体,状态可以由质量、位置、速度以及时间来描述:
#[derive(Clone)]
pub struct Particle<R: RealFloat, const E: usize> {
pub mass: R,
pub charge: R,
pub position: VectorC<R, E>,
pub velocity: VectorC<R, E>,
pub time: R,
}此时牛顿第二定律可以表示为:
\begin{gathered}
\vec{F}\left(t, \vec{r}(t), \dfrac{\mathrm{d} \vec{r}(t)}{\mathrm{d} t}\right)
= m \dfrac{\mathrm{d}^2 \vec{r}(t)}{\mathrm{d} t^2} \\\\
\dfrac{\mathrm{d} \vec{r}(t)}{\mathrm{d} t} = \vec{v}(t),
\quad\dfrac{\mathrm{d}^2 \vec{r}(t)}{\mathrm{d} t^2} = \vec{a}(t)
\end{gathered}
此时状态转移方程可以表示为:
\begin{gathered}
\vec{a}_n = \dfrac{\vec{F}_n\left(t_n, \vec{r}_n, \vec{v}_n\right)}{m},
\quad\vec{v}_{n + 1} = \vec{v}_n + \vec{a}_n \Delta t \\
\vec{r}_{n + 1} = \vec{r}_n + \vec{v}_{n + 1} \Delta t,
\quad t_{n + 1} = t_n + \Delta t
\end{gathered}
基于这个状态转移方程,我们可以得到一系列的状态:
\left(m, \vec{r}_0, \vec{v}_0, t_0\right) \to \left(m, \vec{r}_1, \vec{v}_1, t_1\right)
\to\cdots\to\left(m, \vec{r}_n, \vec{v}_n, t_n\right)
根据研究的问题判断迭代终止条件,最后的状态就是我们要的结果
使用 Rust 实现可以得到:
impl<'a, R: RealFloat + 'a, const E: usize> Particle<R, E> {
pub fn default_transition(
acceleration: Rc<dyn Fn(Self) -> VectorC<R, E>>,
dt: R,
) -> Rc<dyn Fn(Self) -> Self + 'a> {
Rc::new(move |p: Self| -> Self {
let velocity = p.velocity.clone() + acceleration(p.clone()) * dt.clone();
let position = p.position.clone() + velocity.clone() * dt.clone();
Self {
mass: p.mass,
charge: p.charge,
velocity,
position,
time: p.time.clone() + dt.clone(),
}
})
}
pub fn simulate(self, transition: Rc<dyn Fn(Self) -> Self>) -> Iterate<'a, Self> {
Iterate::of(transition, self)
}
}阻尼谐振子
作为受力随位置和速度相关的例子,可以考虑有一个阻尼谐振子, 即一个竖直悬挂的弹簧,末端有一个小球
假设向上为正方向,并且零点选择在弹簧平衡时的末端位置,
小球质量为 $2.7 \,\mathrm{g}$,半径为 $2 \,\mathrm{cm}$
假设空气阻力系数为 $C = 2$,空气密度为 $\rho = 1.2 \,\mathrm{kg/m^3}$,
重力加速度为 $g = \pi^2 \,\mathrm{m/s^2}$,则此时系统受力为:
\begin{gathered}
\vec{F}_\textnormal{total} = \vec{G} + \vec{F}_k + \vec{f} \\\\
\vec{f} = - \dfrac{1}{2} C \rho A \lVert\vec{v}\rVert \vec{v} \\\\
\vec{G} = m \vec{g},\quad\vec{F}_k = -k \Delta\vec{r}
\end{gathered}
其中 $\Delta\vec{r}$ 表示弹簧距离平衡点的相对位移
若劲度系数 $k = 0.8 \,\mathrm{kg/s^2}$,初始位置为 $10 \,\mathrm{cm}$,初速度为 $\vec{v} = \vec{0}$,则:
use std::rc::Rc;
use phyrs::newton::particle::Particle;
use plotters::{
chart::ChartBuilder,
prelude::{BitMapBackend, IntoDrawingArea},
series::LineSeries,
style::full_palette::{BLUE_400, YELLOW_50},
};
use rmatrix_ks::{
matrix::vector::{VectorC, basis_vector},
number::{
instances::double::Double,
traits::{floating::Floating, fractional::Fractional, zero::Zero},
},
};
fn main() {
run().unwrap()
}
fn run() -> Option<()> {
// 初始状态
let state = Particle::<Double, 1>::without_charge(
Double::of(2.7e-3),
VectorC::of(&[0.1].map(Double::of))?,
VectorC::default(),
Double::zero(),
);
// 加速度
let total_acc = Rc::new(|s: Particle<Double, 1>| -> VectorC<Double, 1> {
let g = -basis_vector(1) * Double::PI.power(Double::of(2.0));
g // 重力
- (s.position * Double::of(0.8) // 弹力
+ s.velocity // 空气阻力
* Double::of(2.0) // 空气阻力系数
* Double::of(1.2) // 空气密度
* Double::PI
* Double::of(2e-2).power(Double::of(2.0)) // A = pi r^2
* Double::half()) / s.mass
});
// 模拟计算
let one_step = Particle::default_transition(total_acc, Double::of(0.001));
// 计算 0 到 3 秒内的运动轨迹
let states = state
.simulate(one_step)
.take_while(|s| s.time <= Double::of(3.0));
// 绘图
let draw_area = BitMapBackend::new("result/draw_damp.png", (960, 512)).into_drawing_area();
draw_area.fill(&YELLOW_50).ok()?;
let mut chart = ChartBuilder::on(&draw_area)
.margin(10)
.caption("阻尼谐振子", ("Zhuque Fangsong (technical preview)", 48))
.x_label_area_size(48)
.y_label_area_size(64)
.build_cartesian_2d(0.0..3.0, -0.2..0.2)
.ok()?;
chart
.configure_mesh()
.axis_desc_style(("Zhuque Fangsong (technical preview)", 24))
.x_desc("时间 (s)")
.y_desc("位置 (m)")
.draw()
.ok()?;
chart
.draw_series(LineSeries::new(
states.map(|s| (s.time.raw(), s.position[(1, 1)].raw())),
&BLUE_400,
))
.ok()?;
draw_area.present().ok()?;
Some(())
}得到的图像为:
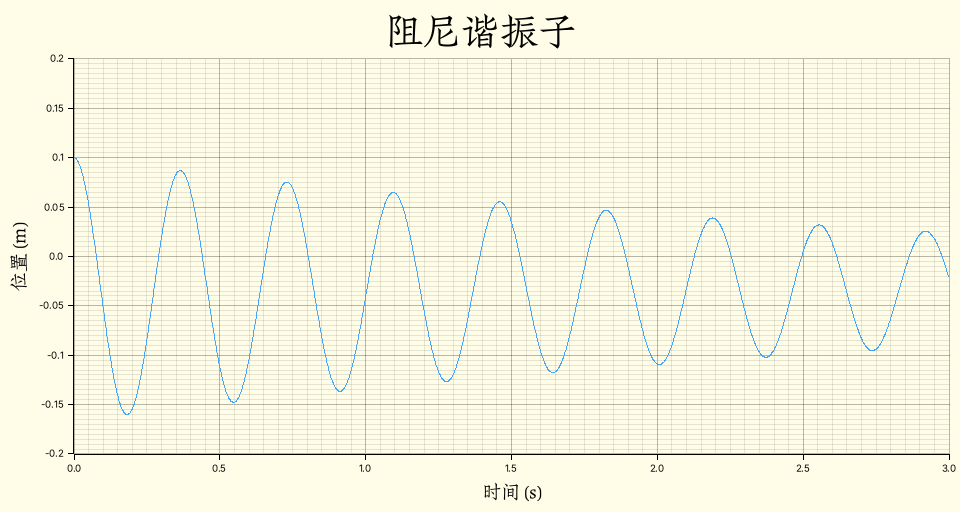
可以看到,由于小球的重力,系统的平衡点并不是最初的 $0 \,\mathrm{m}$,
而是 $z_0 = m g / k \approx 0.033 \,\mathrm{m}$
欧拉-克罗默方法
实际上,我们使用的方法是 欧拉-克罗默 方法1
通常的欧拉法使用的是上一个状态的速度来计算下一个状态的位移, 而欧拉-克罗默方法则是使用下一个状态的速度来计算下一个状态的位移,即:
\begin{cases}
\vec{r}_{n + 1} = \vec{r}_n + \vec{v}_{\textcolor{red}{n}}\Delta t
&\textnormal{Euler method} \\\\
\vec{r}_{n + 1} = \vec{r}_n + \vec{v}_{\textcolor{green}{n + 1}}\Delta t
&\textnormal{Euler–Cromer}
\end{cases}
欧拉-克罗默方法的结果比欧拉法更符合能量守恒,精度和稳定性也比欧拉法高
求解微分方程
大部分动力学问题都可以转化为一个求解微分方程的问题
但是大部分微分方程很难得到一个精确解,所以求解微分方程更多的还是使用数值方法,例如欧拉法
由于数值方法多种多样,所以在 Particle 中,
simulate 接受 transition 而不是合力,这是为了将模拟过程与数值方法解耦
比如我们还可以使用 龙格-库塔 方法2:
// Self: Particle<R, E>
pub fn rk4_transition(
acceleration: Rc<dyn Fn(Self) -> VectorC<R, E>>,
dt: R,
) -> Rc<dyn Fn(Self) -> Self + 'a> {
Rc::new(move |p: Self| -> Self {
// k1
let mut pk = p.clone();
let k1_v = acceleration(pk.clone());
let k1_r = pk.velocity.clone();
// k2
pk = Self {
time: p.time.clone() + R::half() * dt.clone(),
position: p.position.clone() + k1_r.clone() * R::half() * dt.clone(),
velocity: p.velocity.clone() + k1_v.clone() * R::half() * dt.clone(),
..pk
};
let k2_v = acceleration(pk.clone());
let k2_r = pk.velocity.clone();
// k3
pk = Self {
time: p.time.clone() + R::half() * dt.clone(),
position: p.position.clone() + k2_r.clone() * R::half() * dt.clone(),
velocity: p.velocity.clone() + k2_v.clone() * R::half() * dt.clone(),
..pk
};
let k3_v = acceleration(pk.clone());
let k3_r = pk.velocity.clone();
// k4
pk = Self {
time: p.time.clone() + dt.clone(),
position: p.position.clone() + k3_r.clone() * dt.clone(),
velocity: p.velocity.clone() + k3_v.clone() * dt.clone(),
..pk
};
let k4_v = acceleration(pk.clone());
let k4_r = pk.velocity.clone();
// result
let velocity = p.velocity
+ (k1_v + k2_v * Self::u(2) + k3_v * Self::u(2) + k4_v) * dt.clone() / Self::u(6);
let position = p.position
+ (k1_r + k2_r * Self::u(2) + k3_r * Self::u(2) + k4_r) * dt.clone() / Self::u(6);
Self {
time: p.time + dt.clone(),
position,
velocity,
..p
}
})
}
pub fn dormand_prince_transition(
acceleration: Rc<dyn Fn(Self) -> VectorC<R, E>>,
dt: R,
) -> Rc<dyn Fn(Self) -> Self + 'a> {
Rc::new(move |p: Self| -> Self {
// k1
let mut pk = p.clone();
let k1_v = acceleration(pk.clone());
let k1_r = pk.velocity.clone();
// k2
pk = Self {
time: p.time.clone() + dt.clone() / Self::u(5),
position: p.position.clone() + k1_r.clone() * dt.clone() / Self::u(5),
velocity: p.velocity.clone() + k1_v.clone() * dt.clone() / Self::u(5),
..pk
};
let k2_v = acceleration(pk.clone());
let k2_r = pk.velocity.clone();
// k3
pk = Self {
time: p.time.clone() + Self::u(3) * dt.clone() / Self::u(10),
position: p.position.clone()
+ (k1_r.clone() * Self::u(3) + k2_r.clone() * Self::u(9)) * dt.clone()
/ Self::u(40),
velocity: p.velocity.clone()
+ (k1_v.clone() * Self::u(3) + k2_v.clone() * Self::u(9)) * dt.clone()
/ Self::u(40),
..pk
};
let k3_v = acceleration(pk.clone());
let k3_r = pk.velocity.clone();
// k4
pk = Self {
time: p.time.clone() + Self::u(4) * dt.clone() / Self::u(5),
position: p.position.clone()
+ (k1_r.clone() * Self::u(44) - k2_r.clone() * Self::u(168)
+ k3_r.clone() * Self::u(160))
* dt.clone()
/ Self::u(45),
velocity: p.velocity.clone()
+ (k1_v.clone() * Self::u(44) - k2_v.clone() * Self::u(168)
+ k3_v.clone() * Self::u(160))
* dt.clone()
/ Self::u(45),
..pk
};
let k4_v = acceleration(pk.clone());
let k4_r = pk.velocity.clone();
// k5
pk = Self {
time: p.time.clone() + Self::u(8) * dt.clone() / Self::u(9),
position: p.position.clone()
+ (k1_r.clone() * Self::u(19372) / Self::u(6561)
- k2_r.clone() * Self::u(25360) / Self::u(2187)
+ k3_r.clone() * Self::u(64448) / Self::u(6561)
- k4_r.clone() * Self::u(212) / Self::u(729))
* dt.clone(),
velocity: p.velocity.clone()
+ (k1_v.clone() * Self::u(19372) / Self::u(6561)
- k2_v.clone() * Self::u(25360) / Self::u(2187)
+ k3_v.clone() * Self::u(64448) / Self::u(6561)
- k4_v.clone() * Self::u(212) / Self::u(729))
* dt.clone(),
..pk
};
let k5_v = acceleration(pk.clone());
let k5_r = pk.velocity.clone();
// k6
pk = Self {
time: p.time.clone() + dt.clone(),
position: p.position.clone()
+ (k1_r.clone() * Self::u(9017) / Self::u(3168)
- k2_r * Self::u(355) / Self::u(33)
+ k3_r.clone() * Self::u(46732) / Self::u(5247)
+ k4_r.clone() * Self::u(49) / Self::u(176)
- k5_r.clone() * Self::u(5103) / Self::u(18656))
* dt.clone(),
velocity: p.velocity.clone()
+ (k1_v.clone() * Self::u(9017) / Self::u(3168)
- k2_v * Self::u(355) / Self::u(33)
+ k3_v.clone() * Self::u(46732) / Self::u(5247)
+ k4_v.clone() * Self::u(49) / Self::u(176)
- k5_v.clone() * Self::u(5103) / Self::u(18656))
* dt.clone(),
..pk
};
let k6_v = acceleration(pk.clone());
let k6_r = pk.velocity.clone();
// result
let velocity = p.velocity
+ (k1_v * Self::u(35) / Self::u(384)
+ k3_v * Self::u(500) / Self::u(1113)
+ k4_v * Self::u(125) / Self::u(192)
- k5_v * Self::u(2187) / Self::u(6784)
+ k6_v * Self::u(11) / Self::u(84))
* dt.clone();
let position = p.position
+ (k1_r * Self::u(35) / Self::u(384)
+ k3_r * Self::u(500) / Self::u(1113)
+ k4_r * Self::u(125) / Self::u(192)
- k5_r * Self::u(2187) / Self::u(6784)
+ k6_r * Self::u(11) / Self::u(84))
* dt.clone();
Self {
time: p.time + dt.clone(),
position,
velocity,
..p
}
})
}这里使用 $f(t) = e^t$ 在 $t = 8$ 处的值为例子:
| 步长 | 参考值 | 欧拉-克罗默 | 四阶龙格-库塔 | Dormand Prince |
|---|---|---|---|---|
| 0.1 | 2980.95799 | 2834.44297 | 2980.95809 | 2980.95799 |
| 0.01 | 2980.95799 | 2966.08303 | 2980.95799 | 2980.95799 |
| 0.001 | 2980.95799 | 2976.49028 | 2977.97852 | 2977.97852 |
对应相对误差为:
| 步长 | 欧拉-克罗默 | 四阶龙格-库塔 | Dormand Prince |
|---|---|---|---|
| 0.1 | $4.915\%$ | $\left(3.470 \times 10^{-6}\right)\%$ | $\left(1.456 \times 10^{-9}\right)\%$ |
| 0.01 | $\left(4.990 \times 10^{-1}\right)\%$ | $\left(3.366 \times 10^{-10}\right)\%$ | $\left(1.048 \times 10^{-11}\right)\%$ |
| 0.001 | $\left(1.499 \times 10^{-1}\right)\%$ | $\left(9.995 \times 10^{-2}\right)\%$ | $\left(9.995 \times 10^{-2}\right)\%$ |
可以看到,在 $\mathrm{d}t = 0.001$ 的时候,四阶龙格-库塔方法和 Dormand Prince 方法都出现了误差增大的现象,
这是因为此时计算的误差主要是舍入误差而不是截断误差,这导致了步长变小,误差反而增大
一般情况下,欧拉-克罗默方法就足够使用了
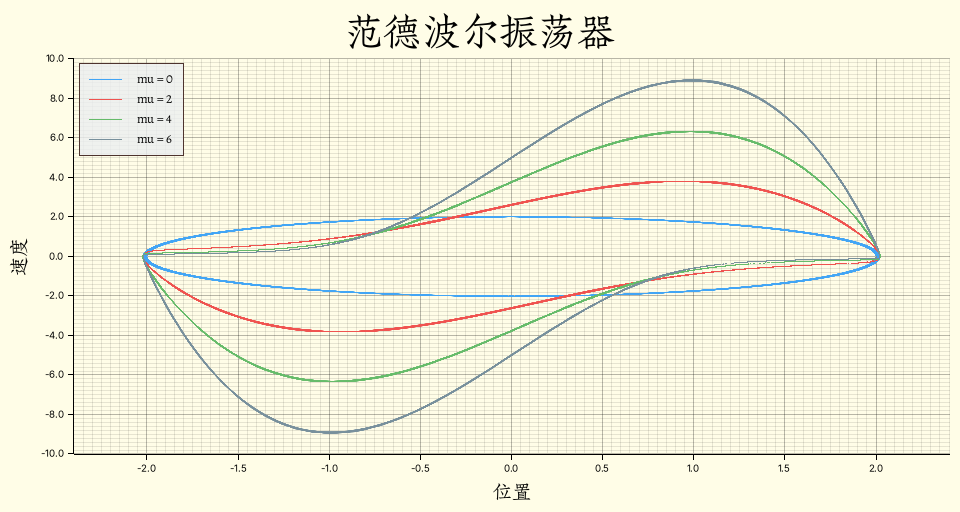
范德波尔振荡器
这里再展示一个求解微分方程的例子,即范德波尔振荡器:
\dfrac{\mathrm{d}^2 x}{\mathrm{d} t^2}
- \mu\left(1 - x^2\right) \dfrac{\mathrm{d} x}{\mathrm{d} t} + x = 0
类比牛顿第二定律,假设质量和劲度系数都为 $1$,此时合力可以看成:
\begin{gathered}
F_\textnormal{total} = F_k + F_\textnormal{damp} \\\\
F_k = -x,\quad F_\textnormal{damp} = \mu (1 - x^2) v
\end{gathered}
则对于 $\mu = 0$、$\mu = 2$、$\mu = 4$ 和 $\mu = 6$ 有如下代码:
use std::rc::Rc;
use phyrs::newton::particle::Particle;
use plotters::{
chart::{ChartBuilder, SeriesLabelPosition},
prelude::{BitMapBackend, IntoDrawingArea, PathElement},
series::LineSeries,
style::{
Color,
full_palette::{
BLUE_400, BLUEGREY_50, BLUEGREY_400, BROWN_800, GREEN_400, RED_400, YELLOW_50,
},
},
};
use rmatrix_ks::{
matrix::vector::{VectorC, basis_vector},
number::{
instances::double::Double,
traits::{floating::Floating, one::One, zero::Zero},
},
};
fn main() {
run().unwrap()
}
fn run() -> Option<()> {
// 初始状态
let state = Particle::<Double, 1>::without_charge(
Double::one(),
VectorC::of(&[Double::of(2.0)])?,
VectorC::default(),
Double::zero(),
);
// 加速度
let total_acc = |mu: f64| -> Rc<dyn Fn(Particle<Double, 1>) -> VectorC<Double, 1>> {
Rc::new(move |s: Particle<Double, 1>| -> VectorC<Double, 1> {
(basis_vector(1)
* Double::of(mu)
* (Double::one() - s.position[(1, 1)].clone().power(Double::of(2.0)))
* s.velocity[(1, 1)].clone()
- s.position)
/ s.mass
})
};
// 模拟计算
let states0 = state
.clone()
.simulate(Particle::rk4_transition(
total_acc(0.0),
Double::of(0.015625),
))
.take_while(|s| s.time <= Double::of(512.0));
let states2 = state
.clone()
.simulate(Particle::rk4_transition(
total_acc(2.0),
Double::of(0.015625),
))
.take_while(|s| s.time <= Double::of(512.0));
let states4 = state
.clone()
.simulate(Particle::rk4_transition(
total_acc(4.0),
Double::of(0.015625),
))
.take_while(|s| s.time <= Double::of(512.0));
let states6 = state
.simulate(Particle::rk4_transition(
total_acc(6.0),
Double::of(0.015625),
))
.take_while(|s| s.time <= Double::of(512.0));
// 绘图
let draw_area = BitMapBackend::new("result/draw_vanderpol.png", (960, 512)).into_drawing_area();
draw_area.fill(&YELLOW_50).ok()?;
let mut chart = ChartBuilder::on(&draw_area)
.margin(10)
.caption(
"范德波尔振荡器",
("Zhuque Fangsong (technical preview)", 48),
)
.x_label_area_size(48)
.y_label_area_size(64)
.build_cartesian_2d(-2.4..2.4, -10.0..10.0)
.ok()?;
chart
.configure_mesh()
.axis_desc_style(("Zhuque Fangsong (technical preview)", 24))
.x_desc("位置")
.y_desc("速度")
.draw()
.ok()?;
chart
.draw_series(LineSeries::new(
states0.map(|s| (s.position[(1, 1)].raw(), s.velocity[(1, 1)].raw())),
&BLUE_400,
))
.ok()?
.label("mu = 0")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 32, y)], BLUE_400));
chart
.draw_series(LineSeries::new(
states2.map(|s| (s.position[(1, 1)].raw(), s.velocity[(1, 1)].raw())),
&RED_400,
))
.ok()?
.label("mu = 2")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 32, y)], RED_400));
chart
.draw_series(LineSeries::new(
states4.map(|s| (s.position[(1, 1)].raw(), s.velocity[(1, 1)].raw())),
&GREEN_400,
))
.ok()?
.label("mu = 4")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 32, y)], GREEN_400));
chart
.draw_series(LineSeries::new(
states6.map(|s| (s.position[(1, 1)].raw(), s.velocity[(1, 1)].raw())),
&BLUEGREY_400,
))
.ok()?
.label("mu = 6")
.legend(|(x, y)| PathElement::new(vec![(x, y), (x + 32, y)], BLUEGREY_400));
chart
.configure_series_labels()
.border_style(BROWN_800)
.label_font(("Zhuque Fangsong (technical preview)", 16))
.legend_area_size(48)
.background_style(BLUEGREY_50.mix(0.8))
.position(SeriesLabelPosition::UpperLeft)
.draw()
.ok()?;
draw_area.present().ok()?;
Some(())
}对应位置和速度的相图如下:
有了龙格-库塔方法,大部分的常微分方程都可以尝试求解了
不过更重要的是知道如何转化物理问题到微分方程,包括如何确定状态转移函数
-
Semi-implicit Euler method.Wikipedia [DB/OL].(2025-04-15)[2025-07-12]. https://en.wikipedia.org/wiki/Semi-implicit_Euler_method ↩
-
Runge–Kutta methods.Wikipedia [DB/OL].(2025-07-07)[2025-07-12]. https://en.wikipedia.org/wiki/Runge–Kutta_methods ↩